




ဂီယာပြောင်းယန္တရားတစ်ခုအနေဖြင့် ဂြိုဟ်ဂီယာကို ဂီယာလျှော့စက်၊ ကရိန်း၊ ဂြိုဟ်ဂီယာလျှော့စက်စသည့် အင်ဂျင်နီယာလုပ်ငန်းစဉ်အမျိုးမျိုးတွင် ကျယ်ကျယ်ပြန့်ပြန့်အသုံးပြုကြသည်။ ဂြိုဟ်ဂီယာလျှော့စက်အတွက် ၎င်းသည် ပုံသေဝင်ရိုးဂီယာရထား၏ ဂီယာပြောင်းယန္တရားကို များစွာသောကိစ္စများတွင် အစားထိုးနိုင်သည်။ ဂီယာပြောင်းလုပ်ငန်းစဉ်သည် လိုင်းထိတွေ့မှုဖြစ်သောကြောင့် အချိန်ကြာမြင့်စွာ ပေါင်းစပ်ခြင်းသည် ဂီယာပျက်ကွက်မှုကို ဖြစ်စေနိုင်သောကြောင့် ၎င်း၏အစွမ်းသတ္တိကို တုပရန် လိုအပ်ပါသည်။ Li Hongli နှင့်အဖွဲ့သည် ဂြိုဟ်ဂီယာကို ပေါင်းစပ်ရန် အလိုအလျောက်ပေါင်းစပ်နည်းလမ်းကို အသုံးပြုခဲ့ပြီး torque နှင့် အမြင့်ဆုံးဖိအားသည် linear ဖြစ်ကြောင်း ရရှိခဲ့သည်။ Wang Yanjun နှင့်အဖွဲ့သည် အလိုအလျောက်ထုတ်လုပ်သည့်နည်းလမ်းဖြင့် ဂြိုဟ်ဂီယာကို ပေါင်းစပ်ခဲ့ပြီး ဂြိုဟ်ဂီယာ၏ statics နှင့် modal simulation ကို တုပခဲ့သည်။ ဤစာတမ်းတွင် tetrahedron နှင့် hexahedron ဒြပ်စင်များကို အဓိကအားဖြင့် ပေါင်းစပ်ရန်အသုံးပြုပြီး နောက်ဆုံးရလဒ်များကို အစွမ်းသတ္တိအခြေအနေများနှင့် ကိုက်ညီမှုရှိမရှိ ခွဲခြမ်းစိတ်ဖြာသည်။
၁။ မော်ဒယ်တည်ဆောက်ခြင်းနှင့် ရလဒ်ခွဲခြမ်းစိတ်ဖြာခြင်း
ဂြိုဟ်ဂီယာ၏ သုံးဖက်မြင်ပုံစံထုတ်ခြင်း
ဂြိုဟ်ဂီယာအဓိကအားဖြင့် ring gear၊ sun gear နှင့် planetary gear တို့ဖြင့် ဖွဲ့စည်းထားသည်။ ဤစာတမ်းတွင် ရွေးချယ်ထားသော အဓိက parameters များမှာ- inner gear ring ၏ သွားအရေအတွက်မှာ 66 ခု၊ sun gear ၏ သွားအရေအတွက်မှာ 36 ခု၊ planetary gear ၏ သွားအရေအတွက်မှာ 15 ခု၊ inner gear ring ၏ အပြင်ဘက်အချင်းမှာ 150 mm၊ modulus မှာ 2 mm၊ pressure angle မှာ 20°၊ tooth width မှာ 20 mm၊ addendum height coefficient မှာ 1 ဖြစ်ပြီး backlash coefficient မှာ 0.25 ဖြစ်ပြီး planetary gear သုံးခု ပါဝင်သည်။
ဂြိုဟ်ဂီယာ၏ static simulation analysis
ပစ္စည်းဂုဏ်သတ္တိများကို သတ်မှတ်ပါ- UG ဆော့ဖ်ဝဲလ်တွင် ဆွဲထားသော သုံးဖက်မြင်ဂြိုဟ်ဂီယာစနစ်ကို ANSYS ထဲသို့ တင်သွင်းပြီး အောက်ပါဇယား ၁ တွင်ပြထားသည့်အတိုင်း ပစ္စည်း parameter များကို သတ်မှတ်ပါ။

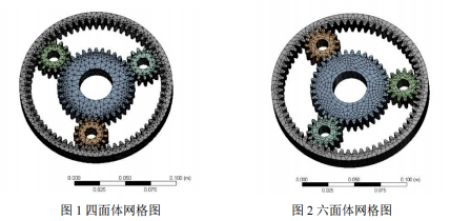
Meshing: finite element mesh ကို tetrahedron နှင့် hexahedron ဖြင့် ပိုင်းခြားထားပြီး element ၏ အခြေခံအရွယ်အစားမှာ 5mm ဖြစ်သည်။ အဘယ်ကြောင့်ဆိုသော်ဂြိုဟ်ဂီယာ၊ နေဂီယာနှင့် အတွင်းဂီယာကွင်းတို့သည် ထိတွေ့ပြီး mesh တွင်ရှိနေပြီး၊ ထိတွေ့မှုနှင့် mesh အစိတ်အပိုင်းများ၏ mesh ကို သိပ်သည်းစေပြီး အရွယ်အစားမှာ 2mm ဖြစ်သည်။ ပထမဦးစွာ၊ ပုံ ၁ တွင်ပြထားသည့်အတိုင်း tetrahedral grid များကို အသုံးပြုသည်။ စုစုပေါင်း အစိတ်အပိုင်း ၁၀၅၉၀၆ ခုနှင့် node ၁၇၇၈၉၃ ခု ထုတ်လုပ်သည်။ ထို့နောက် ပုံ ၂ တွင်ပြထားသည့်အတိုင်း hexahedral grid ကို အသုံးပြုပြီး cell ၂၆၉၅၇ ခုနှင့် node ၁၄၀၅၆၀ ခု ထုတ်လုပ်သည်။
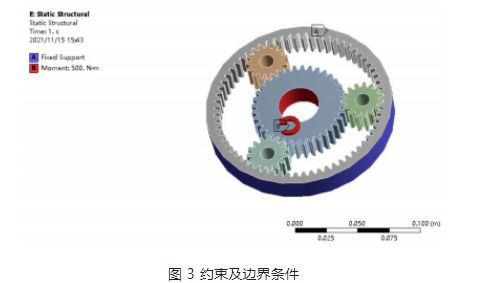
ဝန်အားအသုံးချမှုနှင့် နယ်နိမိတ်အခြေအနေများ- reducer ရှိ planetary gear ၏ အလုပ်လုပ်ပုံဝိသေသလက္ခဏာများအရ၊ sun gear သည် driving gear ဖြစ်ပြီး၊ planetary gear သည် driven gear ဖြစ်ပြီး၊ နောက်ဆုံး output သည် planetary carrier မှတစ်ဆင့်ဖြစ်သည်။ ANSYS တွင် inner gear ring ကိုတပ်ဆင်ပြီး ပုံ ၃ တွင်ပြထားသည့်အတိုင်း sun gear သို့ 500N · m torque ကိုထည့်ပါ။
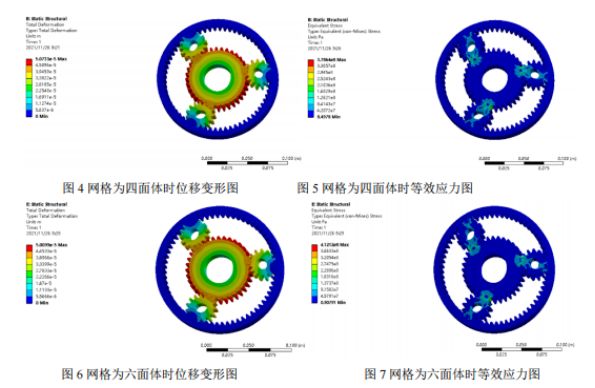
နောက်ဆက်တွဲလုပ်ဆောင်ခြင်းနှင့် ရလဒ်ခွဲခြမ်းစိတ်ဖြာခြင်း- grid နှစ်ခုမှရရှိသော displacement nephogram နှင့် equivalent stress nephogram ကို အောက်တွင်ဖော်ပြထားပြီး နှိုင်းယှဉ်ခွဲခြမ်းစိတ်ဖြာမှုကို ပြုလုပ်ထားသည်။ grid နှစ်မျိုးလုံး၏ displacement nephogram မှ၊ sun gear သည် planetary gear နှင့် မထိစပ်သည့်နေရာတွင် အများဆုံး displacement ဖြစ်ပေါ်ပြီး gear mesh ၏ root တွင် အများဆုံး stress ဖြစ်ပေါ်ကြောင်း တွေ့ရှိရသည်။ tetrahedral grid ၏ အများဆုံး stress မှာ 378MPa ဖြစ်ပြီး hexahedral grid ၏ အများဆုံး stress မှာ 412MPa ဖြစ်သည်။ ပစ္စည်း၏ yield limit မှာ 785MPa ဖြစ်ပြီး safety factor မှာ 1.5 ဖြစ်သောကြောင့် ခွင့်ပြုထားသော stress မှာ 523MPa ဖြစ်သည်။ ရလဒ်နှစ်ခုလုံး၏ အများဆုံး stress သည် ခွင့်ပြုထားသော stress ထက်နည်းပြီး နှစ်ခုစလုံးသည် strength conditions များနှင့် ကိုက်ညီသည်။
၂။ နိဂုံးချုပ်
ဂြိုဟ်ဂီယာ၏ finite element simulation မှတစ်ဆင့်၊ ဂီယာစနစ်၏ displacement deformation nephogram နှင့် equivalent stress nephogram ကို ရရှိပြီး ၎င်းမှ အများဆုံးနှင့် အနည်းဆုံးဒေတာနှင့် ၎င်းတို့၏ ဖြန့်ဖြူးမှုကို ရရှိသည်။ဂြိုဟ်ဂီယာမော်ဒယ်ကို ရှာဖွေနိုင်ပါသည်။ အများဆုံးညီမျှသောဖိအား၏တည်နေရာသည် ဂီယာသွားများ ပျက်ကွက်နိုင်ခြေအများဆုံးနေရာလည်းဖြစ်သောကြောင့် ဒီဇိုင်း သို့မဟုတ် ထုတ်လုပ်မှုပြုလုပ်စဉ် အထူးအာရုံစိုက်သင့်သည်။ ဂြိုဟ်ဂီယာစနစ်တစ်ခုလုံးကို ခွဲခြမ်းစိတ်ဖြာခြင်းဖြင့် ဂီယာသွားတစ်ခုတည်းကိုသာ ခွဲခြမ်းစိတ်ဖြာခြင်းကြောင့် ဖြစ်ပေါ်လာသောအမှားကို ကျော်လွှားနိုင်သည်။
ပို့စ်တင်ချိန်: ၂၀၂၂ ခုနှစ်၊ ဒီဇင်ဘာလ ၂၈ ရက်